Moyens à disposition
La plateforme est constituée de plusieurs équipements :
- un microtomographe RX Solutions (protégé par une enceinte plombée),
- des dispositifs in situ existants ou en développement,
- un logiciel de mesures de champs volumiques,
- deux postes de reconstruction et de traitement d’images 3D,
- un serveur de stockage de données de 36To brut.
Microtomographe aux rayons X
Le microtomographe (protégé par une enceinte plombée) comprend deux générateurs de rayons X interchangeables et quatre détecteurs également interchangeables afin de couvrir une large gamme de matériaux (métaux, alliages légers, composites, polymère, os, géomatériaux…) et de résolutions (de 0.4μm à 100μm). Générateurs et détecteur sont montés sur une table en granit (3m20×1m40) avec trou oblong permettant le passage de câbles et/ ou de dispositifs in-situ. La platine de rotation sur palier à air traversante sur laquelle est positionné l’échantillon est dimensionnée pour supporter des dispositifs in situ lourds, i.e. jusqu’à 100kg, sans dégradation de sa précision de positionnement.
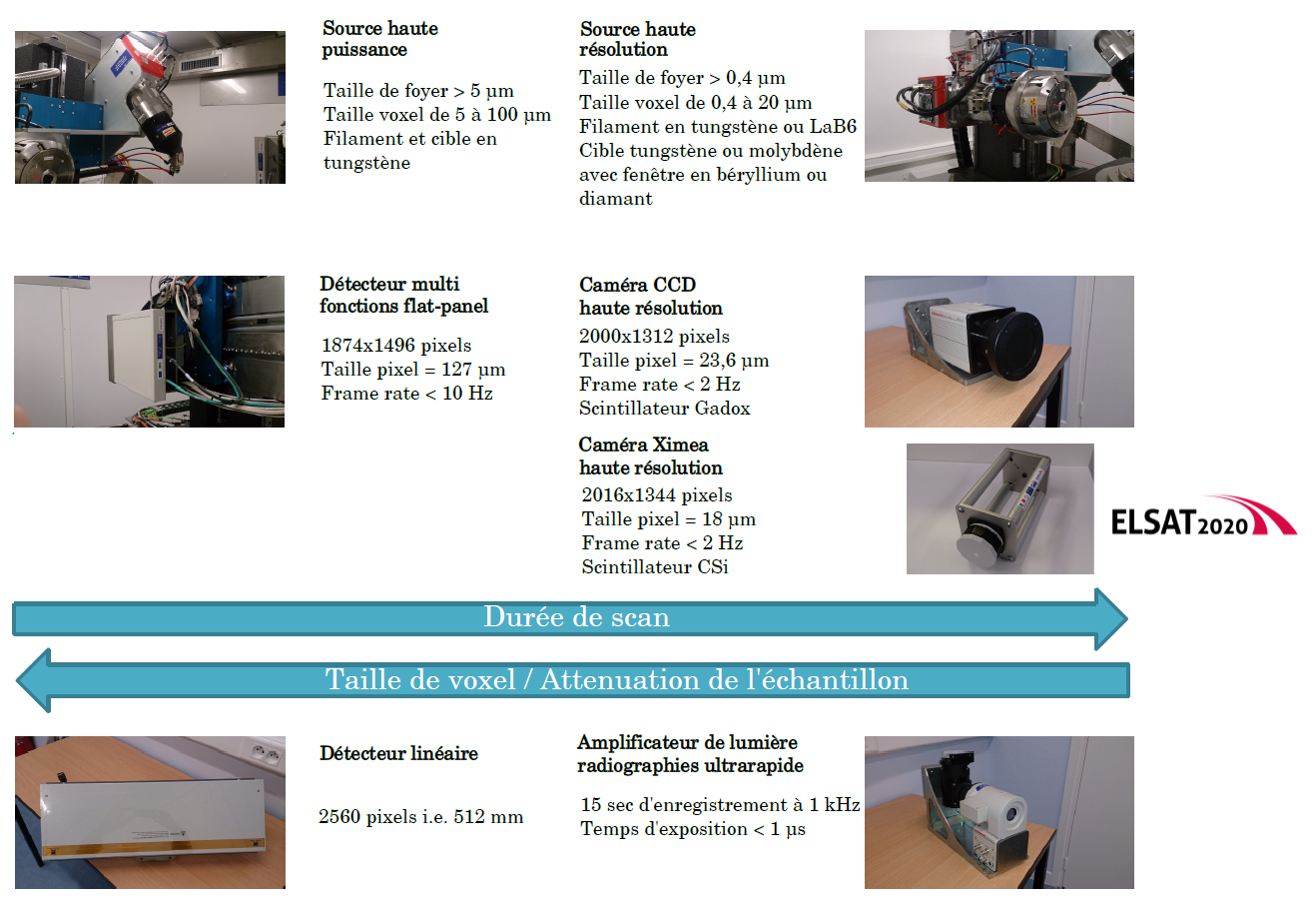
Différents équipements pour le microtomographe RX.
Le poste de pilotage doté du logiciel X-Act permet différents modes d’acquisition suivant la géométrie de l’échantillon :
- « classique » en pleine résolution ou appariement de pixels de détecteurs et en « champ de vue étendu » avec doublage artificiel de la largeur de détecteur par une translation latérale,
- « scan rapide » (une dizaine de min),
- « hélicoïdal » ou « multiscan » pour des objets de grande dimension verticale,
- en laminographie pour les objets de grande dimension latérale,
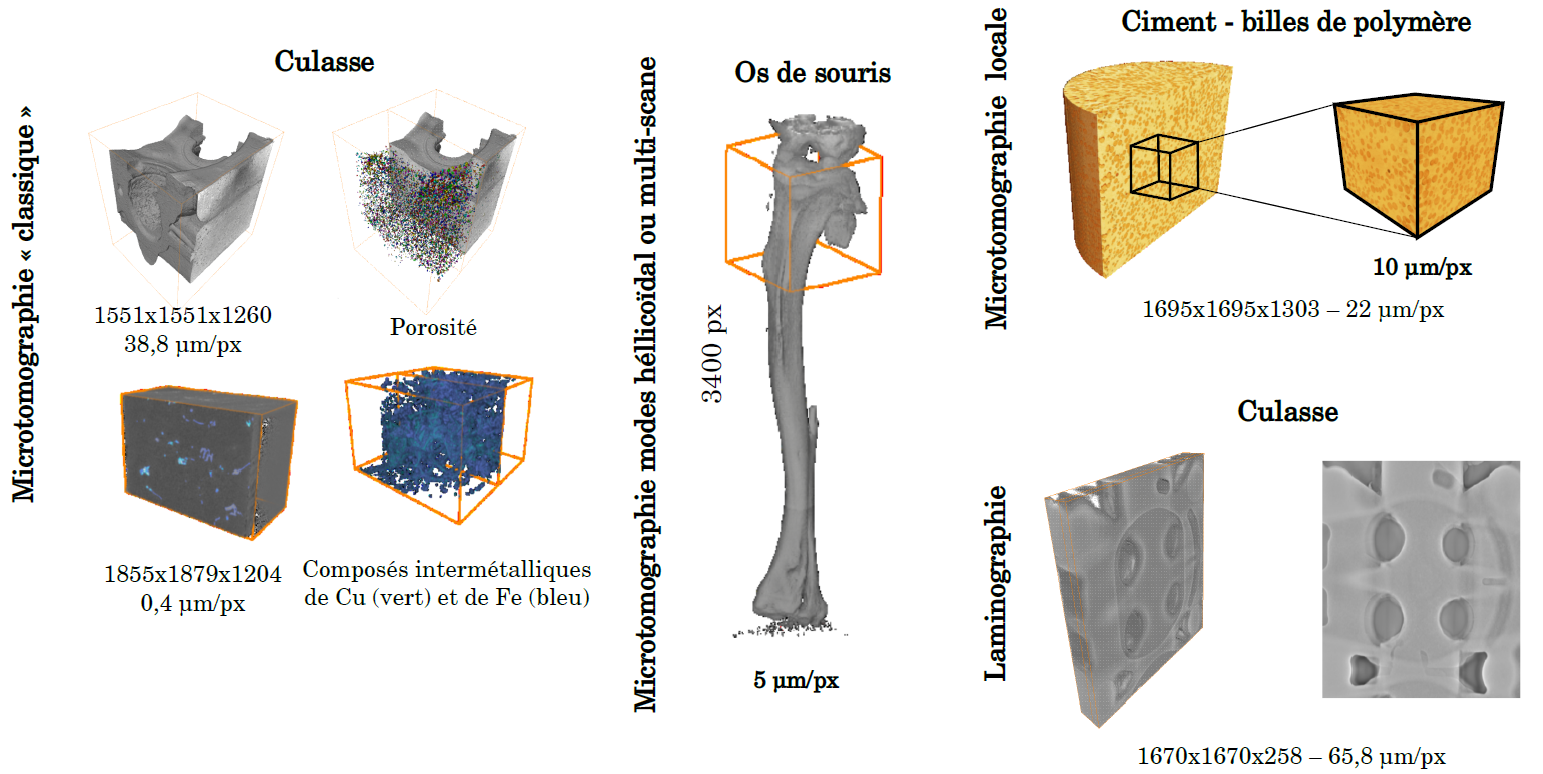
Plusieurs modes d'acquisition disponibles : tomographie classique, hélicoïdale d'objets longs, locale et laminographie d'objets plats.
Cellule uni-axiale in situ sous microtomographe
Une cellule uni-axiale adaptée au microtomographe permet d’imposer des efforts de traction et compression compris entre 50 N et 5000 N. Le chargement est contrôlé par un piston de type « Moto réducteur pas à pas + vis à billes précontraintes » positionné dans le chapeau de la cellule; le moteur est contrôlé en position. La course du piston est de 60 mm à une vitesse maximale de 1 mm/s. Les mors de traction peuvent recevoir des éprouvettes de quelques millimètres de largeur et de longueur inférieure à 10 cm. Les plateaux de compression ont un diamètre de 3 cm. Du fait de l’encombrement de la machine (diamètre 5cm), la plus petite taille de voxel admissible actuellement est de 3 μm. Le centrage de la cellule par rapport à la platine de rotation est assuré au moyen d’une table à chariots croisés automatisés de précision.
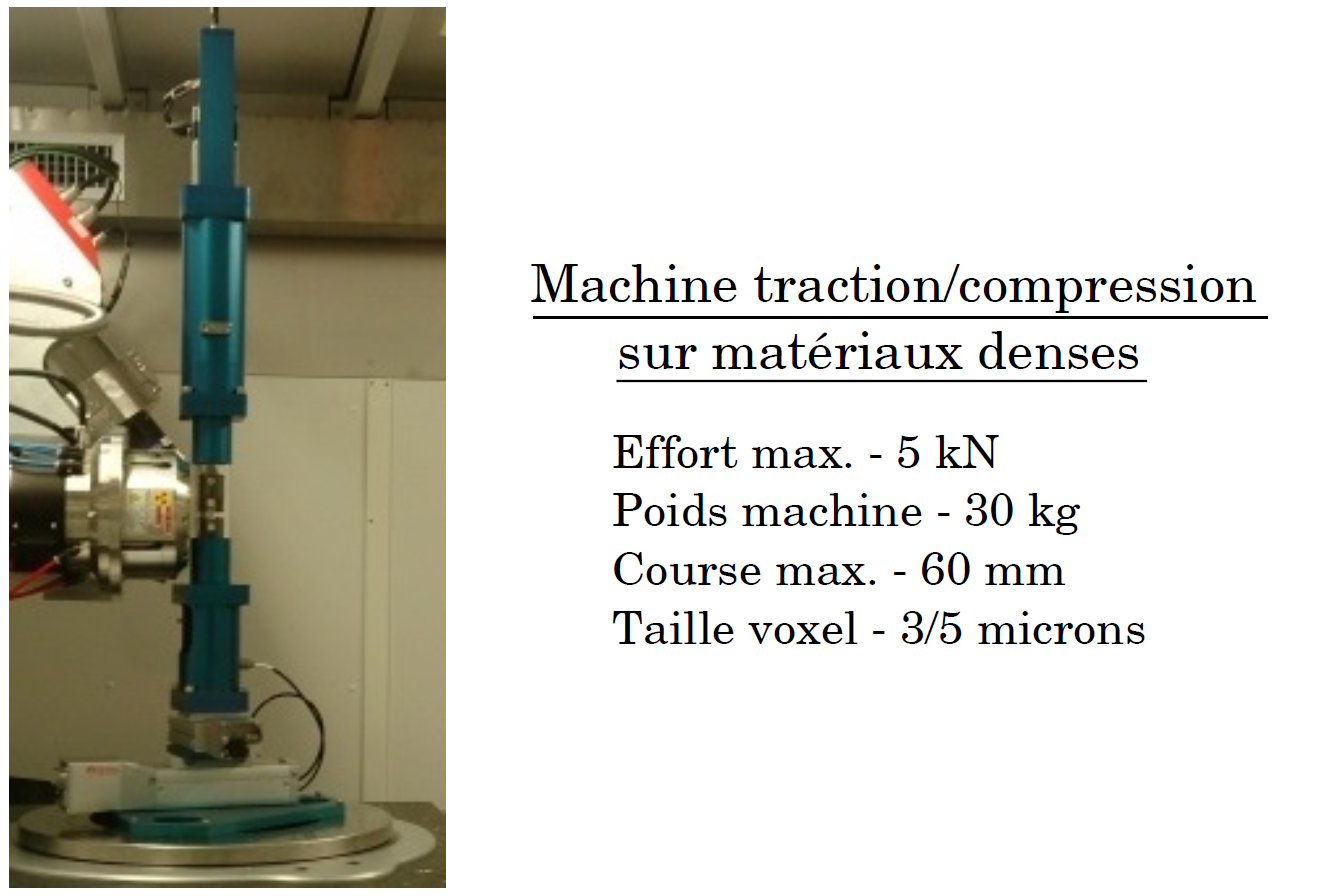
Machine de traction in situ et ses caractéristiques.
D'autres machines sont actuellement en développement notamment des dispositifs triaxial et de torsion.
Mesures de champs cinématiques 3D
La Corrélation d’Images Numériques (CIN) consiste à déterminer un champ de déplacements à partir de l’analyse d’images (soit un ensemble de pixels dont on connaît le niveau de gris). Cette technique apparue dans les années 1980 en mécanique des solides [Sutton 83], a été appliquée à de nombreux domaines, de la caractérisation de comportements mécaniques à l’imagerie médicale. Elle présente un certain nombre d’avantages, le fait qu’elle soit non intrusive ou encore la rapidité de mise en œuvre.
Cette technique repose principalement sur l’équation du flot optique. En effet, si la conservation des niveaux de gris est supposée, la différence entre les images prises à différents instants dépend uniquement du champ de déplacements :
avec f(x) et g(x), respectivement les états de référence et déformé perçus sous forme de scalaires (niveaux de gris), puis u le vecteur déplacement pour chaque position x. Les images doivent donc être texturées, afin de pouvoir retrouver des "motifs" communs d’une image à l’autre. Ainsi, la corrélation d'images volumiques s'avère particulièrement adaptée aux matériaux cimentaires ou aux fontes à graphite :
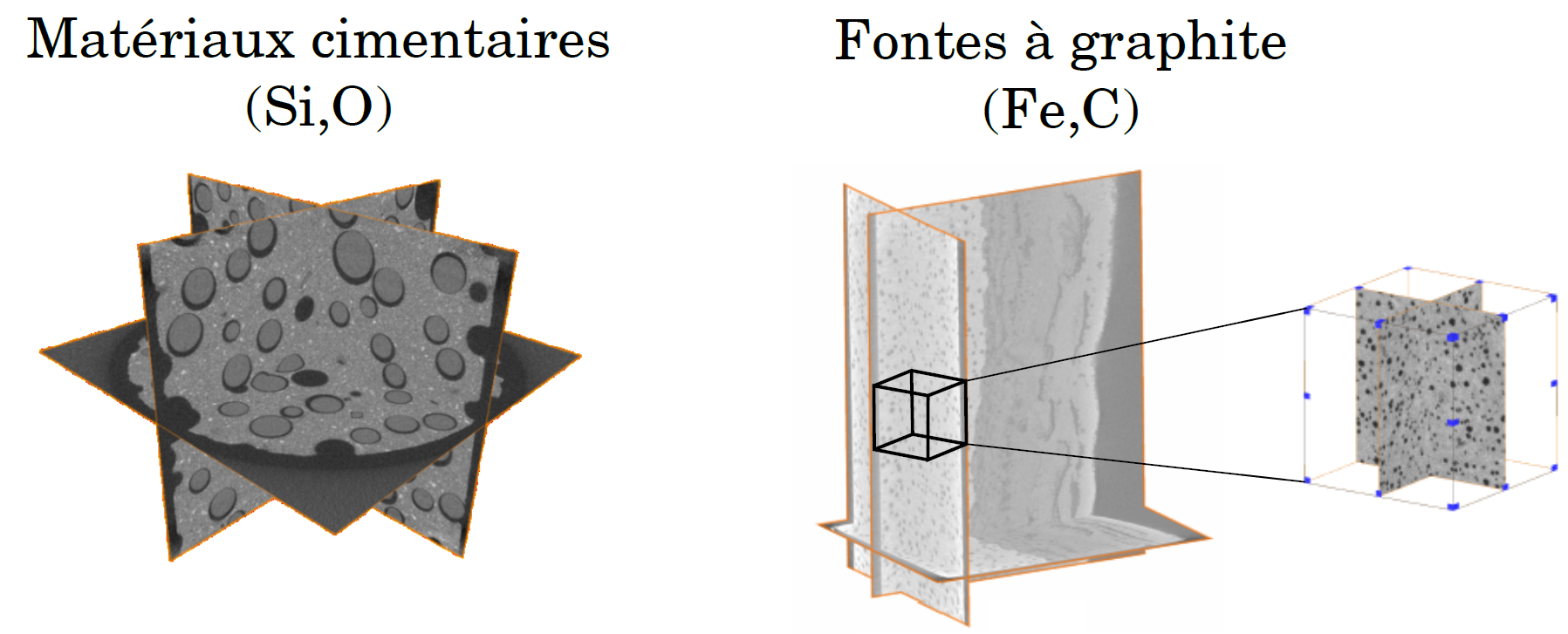
Exemples de microstructures présentant un bon contraste aux RX pour de la corrélation d'images.
A partir des essais mécaniques in situ réalisés sur la plateforme ISIS4D, il est alors possible d’avoir un suivi du matériau au cours du temps. La CIN est réalisée ici avec la plate-forme YaDICs, qui a été développée au LaMcube (Laboratoire de Mécanique, Multiphysique, Multiéchelle) [Seghir 14].
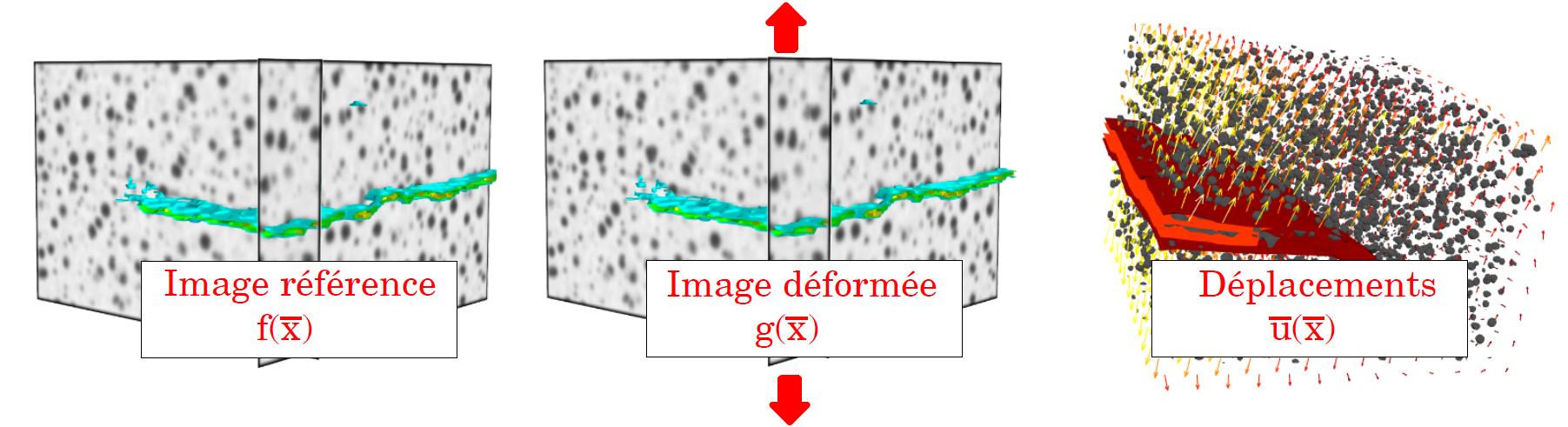
Les images volumiques de référence et déformée ainsi que le champ de déplacements associé.
Des applications sont présentées dans la section "exemples d'études".
Deux stations de reconstruction d’images 3D
La plateforme est équipée de deux stations de reconstruction d’images 3D dotées du logiciel X-Act. La méthode de reconstruction est basée sur un algorithme de rétroprojection filtrée. La reconstruction peut être réalisée à partir de géométries d’acquisition très variées en adéquation avec les différents modes d’acquisition permis par le microtomographe. Ce logiciel permet une reconstruction tomographique haute performance grâce à l’utilisation de plusieurs processeurs graphiques GPU.
Un stockage temporaire d’une durée de 3 mois permet aux utilisateurs de transférer les données acquises sur la plateforme ISIS4D et d’accéder facilement et rapidement au serveur depuis les stations d’analyse d’images.
[Seghir14] Seghir, R, Witz, J.F., & Coudert., S. "YaDICs-Digital Image Correlation 2/3D software." http://yadics.univ-lille1.fr/
[Sutton 83] Sutton, M. A., Wolters, W. J., Peters, W. H., Ranson, W. F., & McNeill, S. R. (1983). Determination of displacements using an improved digital correlation method. Image and vision computing, 1(3), 133-139.